Objective: All optimal control work involving ecological models involves single objective optimization. In this work, we perform multiobjective nonlinear model predictive control (MNLMPC) in conjunction with bifurcation analysis on an ecosystem model. Methods: Bifurcation analysis was performed using the MATLAB software MATCONT while the multi-objective nonlinear model predictive control was performed by using the optimization language PYOMO. Results: Rigorous proof showing the existence of bifurcation (branch) points is presented along with computational validation. It is also demonstrated (both numerically and analytically) that the presence of the branch points was instrumental in obtaining the Utopia solution when the multiobjective nonlinear model prediction calculations were performed. Conclusions: The main conclusions of this work are that one can attain the utopia point in MNLMPC calculations because of the branch points that occur in the ecosystem model and the presence of the branch point can be proved analytically. The use of rigorous mathematics to enhance sustainability will be a significant step in encouraging sustainable development. The main practical implication of this work is that the strategies developed here can be used by all researchers involved in maximizing sustainability The future work will involve using these mathematical strategies to other ecosystem models and food chain models which will be a huge step in developing strategies to address problems involving nutrition.
| Published in | International Journal of Systems Science and Applied Mathematics (Volume 9, Issue 3) |
| DOI | 10.11648/j.ijssam.20240903.11 |
| Page(s) | 37-43 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2024. Published by Science Publishing Group |
Ecosystem, Bifurcation, Optimal Control
 (1)
(1)  (2)
(2) 
 (3)
(3)  Let the tangent plane at any point x be
Let the tangent plane at any point x be  . Consider a matrix A as
. Consider a matrix A as 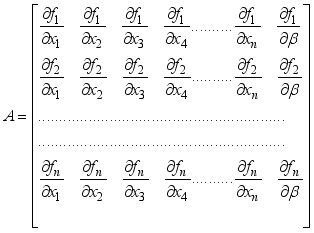 (4)
(4)  (5)
(5)  (6)
(6)  = 0 and for a branch point (BP) the matrix
= 0 and for a branch point (BP) the matrix  must be singular
must be singular 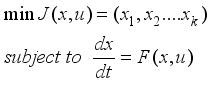 (7)
(7)  individually. The minimization/maximization of
individually. The minimization/maximization of  will lead to the values
will lead to the values  . Then the optimization problem that will be solved is
. Then the optimization problem that will be solved is  (8)
(8)  for all i.
for all i.  l result in the values
l result in the values  and
and  the resulting optimization problem will be
the resulting optimization problem will be  (9)
(9)  is the lagrangian multiplier., the Euler Lagrange equation(costate equations) will be
is the lagrangian multiplier., the Euler Lagrange equation(costate equations) will be  (10)
(10)  (11)
(11)  and
and  are zero. Hence
are zero. Hence 
 (12)
(12)  (13)
(13)  is the lagrangian multiplier. The first term in this equation is 0 and hence
is the lagrangian multiplier. The first term in this equation is 0 and hence  (14)
(14)  yields a limit or a branch point,
yields a limit or a branch point,  is singular.
is singular.  where
where  and
and  . In between there is a vector
. In between there is a vector  where
where  . This coupled with the boundary condition
. This coupled with the boundary condition  will lead to
will lead to  which will cause the problem to become unconstrained. The only solution for the unconstrained problem is the Utopia solution. This is illustrated numerically in the next few sections.
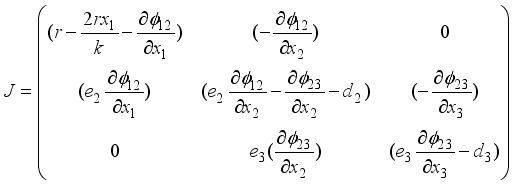
which will cause the problem to become unconstrained. The only solution for the unconstrained problem is the Utopia solution. This is illustrated numerically in the next few sections.  with respect to the variables
with respect to the variables  are
are 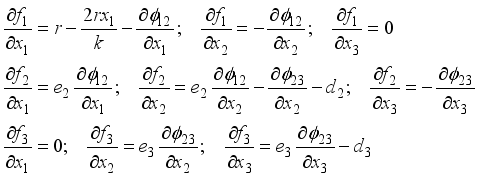 (15)
(15)  (16)
(16) 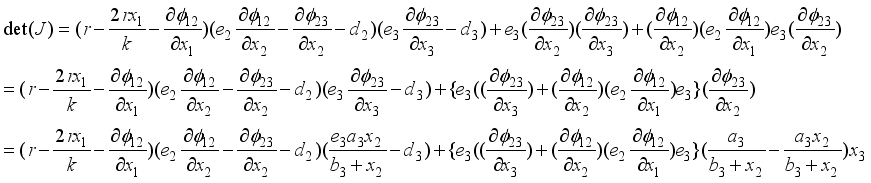 (17)
(17)  This implies that
This implies that  and/or
and/or  .
.  and det (J)=0 t will imply that
and det (J)=0 t will imply that  and det (J)=0 and
and det (J)=0 and  will imply that
will imply that 
 and
and  .
. 
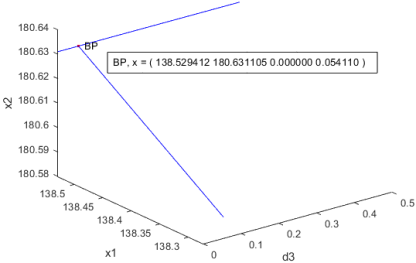
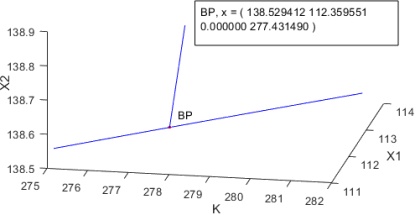
 b3 = 250; the value of
b3 = 250; the value of  .
. 
 b3 = 250; the value of
b3 = 250; the value of  .
.  and.
and.  .
. 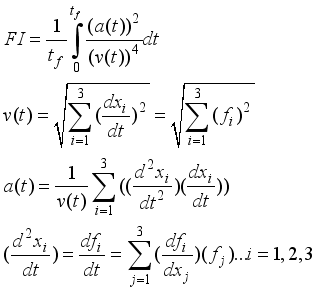 (18)
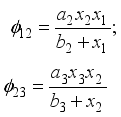
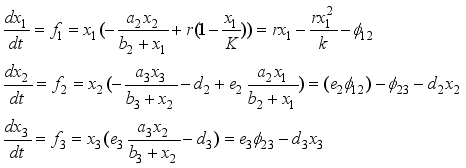
(18)  and the derivatives
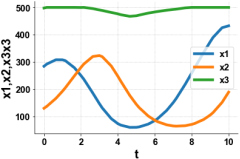
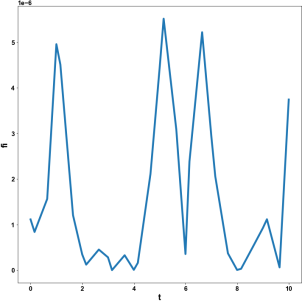
and the derivatives  are provided in equation sets 2 and 3. Both d3 and k were used as control variables. Both
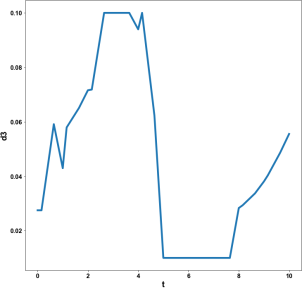
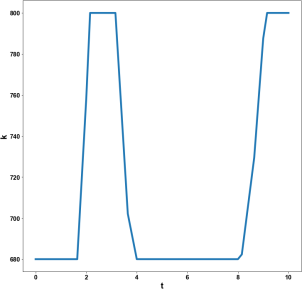
are provided in equation sets 2 and 3. Both d3 and k were used as control variables. Both  and the Fisher index (FI) were maximized individually. The maximization of
and the Fisher index (FI) were maximized individually. The maximization of  resulted in a value of 716.534 while the maximization of FI resulted in a value of 3.965e-05. For the multiobjective nonlinear model predictive calculations, the function minimized was
resulted in a value of 716.534 while the maximization of FI resulted in a value of 3.965e-05. For the multiobjective nonlinear model predictive calculations, the function minimized was  subject to the equation set 2. The resulting objective function value obtained was the utopia point 0. The multiobjective nonlinear model control variables obtained were d3 = 0.0274 and k 680.00.
subject to the equation set 2. The resulting objective function value obtained was the utopia point 0. The multiobjective nonlinear model control variables obtained were d3 = 0.0274 and k 680.00.
| Prey Population |
| Predator Population |
| Super Predator Population |
r | Prey Growrh Rate |
K | Predator Growth rate |
| The Maximum Predation rate of Predator and Super Predator |
| Half Saturation Constant of Predator and Super Predator |
| Death of Predator and Super Predator |
FI | Fisher Index |
BP | Branch Point |
LP | Limit Point |
MNLMPC | Multi-objective Nonlinear Model Predictive Control |
| [1] | Ahmad, N., Derrible, S., Eason, T., Cabezas, H., 2016. Using fisher information to track stability in multivariate systems. R. Soc. Open Sci. 3 160582. |
| [2] | Cabezas, H., Fath, B. D., 2002. Towards a theory of sustainable systems. Fluid Phase Equilib. 194–197, 3–14. |
| [3] | Cabezas, H., Pawlowski, C. W., Mayer, A. L., Hoagland, N. T., 2003. Sustainability: Ecological, social, economic, technological, and systems perspectives. Clean Tech. Environ. Policy 5, 167–180. |
| [4] | Cabezas, H., Pawlowski, C. W., Mayer, A. L., Hoagland, N. T., 2005. Simulated experiments with complex sustainable systems: Ecology and technology. Resour. Conserv. Recycl. 44, 279–291. |
| [5] | Cabezas, H., Pawlowski, C. W., Mayer, A. L., Hoagland, N. T., 2005. Sustainable systems theory: Ecological and other aspects. J. Cleaner Prod. 13, 455–467. |
| [6] | Cabezas, H., Whitmore, H. W., Pawlowski, C. W., Mayer, A. L., 2007. On the sustainability of an integral model system with industrial, ecological, and macroeconomic components. Resour. Conserv. Recycl. 50, 122–129. |
| [7] | Doshi, R., Diwekar, U., Benavides, P. T., Yenkie, K. M., Cabezas, H., 2015. Maximizing sustainability of ecosystem model through socio-economic policies derived from multivariable optimal control theory. Clean Techn. Environ. Policy 17, 1573–1583. |
| [8] | Fath, B. D., Cabezas, H., 2004. Exergy and fisher information as ecological indices. Ecol. Modell. 174, 25–35. |
| [9] | Fath, B. D., Cabezas, H., Pawlowski, C. W., 2003. Regime changes in ecological systems: An information theory approach. J. Theor. Biol. 222, 517–530. |
| [10] | Fisher, R. A., 1922. On the mathematical foundations of theoretical statistics. Philos. Trans. R. Soc. A 222, 309–368. |
| [11] | Shastri, Y., U. Diwekar, Sustainable ecosystem management using optimal control theory: Part 1 (deterministic systems), Journal of Theoretical Biology, Volume 241, Issue 3, 2006, Pages 506-521, ISSN 0022-5193 |
| [12] | Soraya Rawlings, E., J. C. Barrera-Martinez, Vicente Rico-Ramirez, Fisher information calculation in a complex ecological model: An optimal control-based approach, Ecological Modelling, Volume 416, 2020, 108845, ISSN 0304-3800, |
| [13] | Dhooge, A., Govearts, W., and Kuznetsov, A. Y., MATCONT: A Matlab package for numerical bifurcation analysis of ODEs, ACM transactions on Mathematical software 29(2) pp. 141-164, 2003. |
| [14] | Dhooge, A., W. Govaerts; Y. A. Kuznetsov, W. Mestrom, and A. M. Riet, CL_MATCONT; A continuation toolbox in Matlab, 2004. |
| [15] | Kuznetsov, Y. A. Elements of applied bifurcation theory. Springer, NY, 1998. |
| [16] | Kuznetsov, Y. A.(2009). Five lectures on numerical bifurcation analysis, Utrecht University, NL., 2009. |
| [17] | Govaerts, w. J. F., Numerical Methods for Bifurcations of Dynamical Equilibria, SIAM, 2000. |
| [18] | Flores-Tlacuahuac, A. Pilar Morales and Martin Riveral Toledo; Multiobjective Nonlinear model predictive control of a class of chemical reactors. I & EC research; 5891-5899, 2012. |
| [19] | Sridhar, Lakshmi N., (2019) Multiobjective optimization and nonlinear model predictive control of the continuous fermentation process involving Saccharomyces Cerevisiae, Biofuels, |
| [20] | Miettinen, Kaisa, M., Nonlinear Multiobjective Optimization; Kluwers international series, 1999. |
| [21] | Hart, William E., Carl D. Laird, Jean-Paul Watson, David L. Woodruff, Gabriel A. Hackebeil, Bethany L. Nicholson, and John D. Siirola. Pyomo – Optimization Modeling in Python. Second Edition. Vol. 67. Springer, 2017. |
| [22] | Biegler, L. T. An overview of simultaneous strategies for dynamic optimization. Chem. Eng. Process. Process Intensif. 46, 1043–105 (2007). |
| [23] | Wächter, A., Biegler, L. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 106, 25–57 (2006). |
| [24] | Tawarmalani, M. and N. V. Sahinidis, A polyhedral branch-and-cut approach to global optimization, Mathematical Programming, 103(2), 225-249, 200. |
APA Style
Sridhar, L. N. (2024). Bifurcation Analysis and Multiobjective Nonlinear Model Predictive Control of Sustainable Ecosystems. International Journal of Systems Science and Applied Mathematics, 9(3), 37-43. https://doi.org/10.11648/j.ijssam.20240903.11
ACS Style
Sridhar, L. N. Bifurcation Analysis and Multiobjective Nonlinear Model Predictive Control of Sustainable Ecosystems. Int. J. Syst. Sci. Appl. Math. 2024, 9(3), 37-43. doi: 10.11648/j.ijssam.20240903.11
@article{10.11648/j.ijssam.20240903.11,
author = {Lakshmi Narayan Sridhar},
title = {Bifurcation Analysis and Multiobjective Nonlinear Model Predictive Control of Sustainable Ecosystems
},
journal = {International Journal of Systems Science and Applied Mathematics},
volume = {9},
number = {3},
pages = {37-43},
doi = {10.11648/j.ijssam.20240903.11},
url = {https://doi.org/10.11648/j.ijssam.20240903.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ijssam.20240903.11},
abstract = {Objective: All optimal control work involving ecological models involves single objective optimization. In this work, we perform multiobjective nonlinear model predictive control (MNLMPC) in conjunction with bifurcation analysis on an ecosystem model. Methods: Bifurcation analysis was performed using the MATLAB software MATCONT while the multi-objective nonlinear model predictive control was performed by using the optimization language PYOMO. Results: Rigorous proof showing the existence of bifurcation (branch) points is presented along with computational validation. It is also demonstrated (both numerically and analytically) that the presence of the branch points was instrumental in obtaining the Utopia solution when the multiobjective nonlinear model prediction calculations were performed. Conclusions: The main conclusions of this work are that one can attain the utopia point in MNLMPC calculations because of the branch points that occur in the ecosystem model and the presence of the branch point can be proved analytically. The use of rigorous mathematics to enhance sustainability will be a significant step in encouraging sustainable development. The main practical implication of this work is that the strategies developed here can be used by all researchers involved in maximizing sustainability The future work will involve using these mathematical strategies to other ecosystem models and food chain models which will be a huge step in developing strategies to address problems involving nutrition.
},
year = {2024}
}
TY - JOUR T1 - Bifurcation Analysis and Multiobjective Nonlinear Model Predictive Control of Sustainable Ecosystems AU - Lakshmi Narayan Sridhar Y1 - 2024/11/11 PY - 2024 N1 - https://doi.org/10.11648/j.ijssam.20240903.11 DO - 10.11648/j.ijssam.20240903.11 T2 - International Journal of Systems Science and Applied Mathematics JF - International Journal of Systems Science and Applied Mathematics JO - International Journal of Systems Science and Applied Mathematics SP - 37 EP - 43 PB - Science Publishing Group SN - 2575-5803 UR - https://doi.org/10.11648/j.ijssam.20240903.11 AB - Objective: All optimal control work involving ecological models involves single objective optimization. In this work, we perform multiobjective nonlinear model predictive control (MNLMPC) in conjunction with bifurcation analysis on an ecosystem model. Methods: Bifurcation analysis was performed using the MATLAB software MATCONT while the multi-objective nonlinear model predictive control was performed by using the optimization language PYOMO. Results: Rigorous proof showing the existence of bifurcation (branch) points is presented along with computational validation. It is also demonstrated (both numerically and analytically) that the presence of the branch points was instrumental in obtaining the Utopia solution when the multiobjective nonlinear model prediction calculations were performed. Conclusions: The main conclusions of this work are that one can attain the utopia point in MNLMPC calculations because of the branch points that occur in the ecosystem model and the presence of the branch point can be proved analytically. The use of rigorous mathematics to enhance sustainability will be a significant step in encouraging sustainable development. The main practical implication of this work is that the strategies developed here can be used by all researchers involved in maximizing sustainability The future work will involve using these mathematical strategies to other ecosystem models and food chain models which will be a huge step in developing strategies to address problems involving nutrition. VL - 9 IS - 3 ER -
Department of Chemical Engineering, University of Puerto Rico, Mayaguez, Puerto Rico